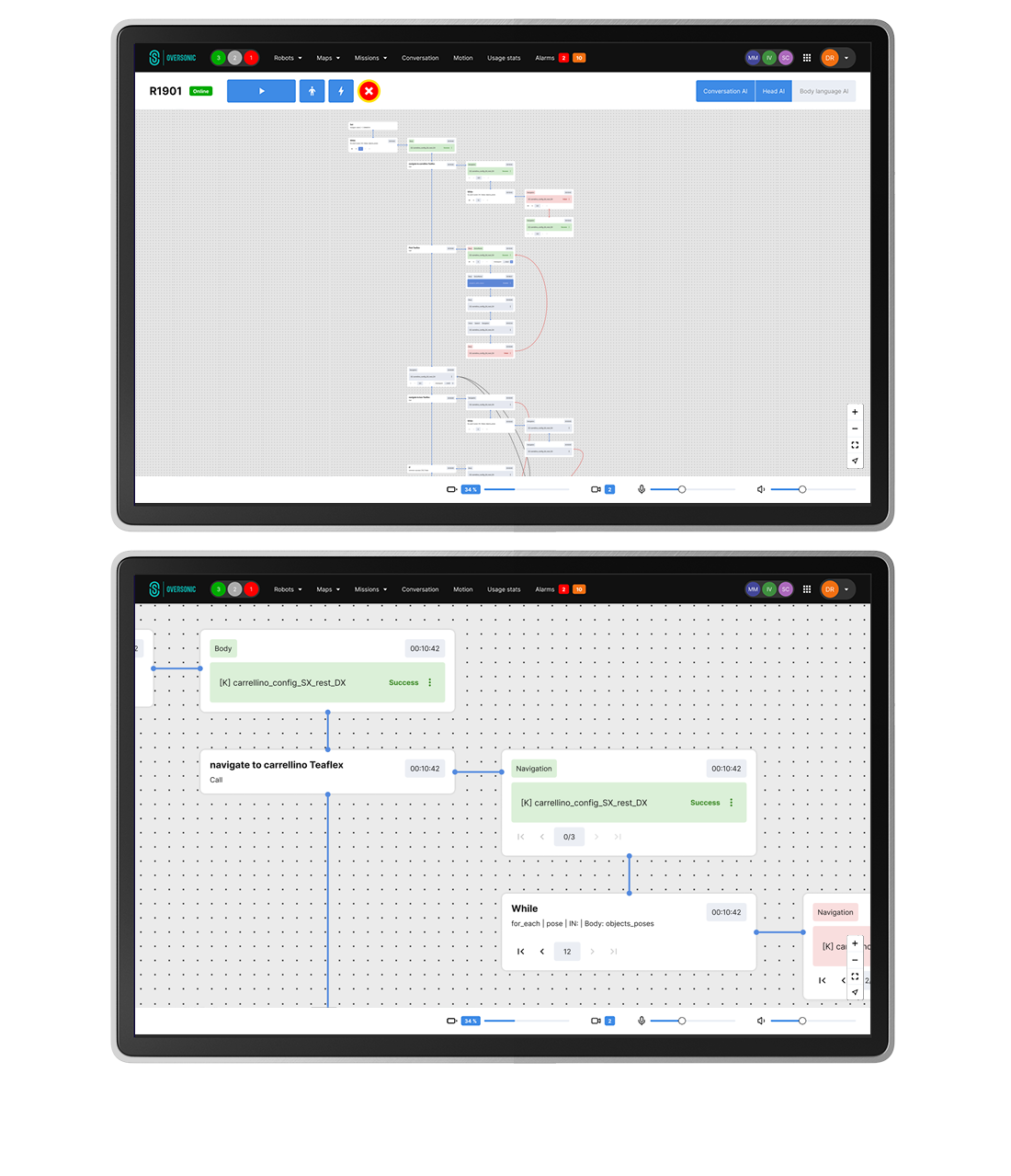
The Missions Module introduces a graph-based programming environment that turns advanced robotic operations into intuitive visual workflows. Through two synergistic interfaces — one for designing logic, the other for monitoring execution — it empowers operators to build, control, and analyze robotic missions without writing code.
This system enables:
| ➔ | Visual composition of robot behaviors through modular task blocks |
|---|---|
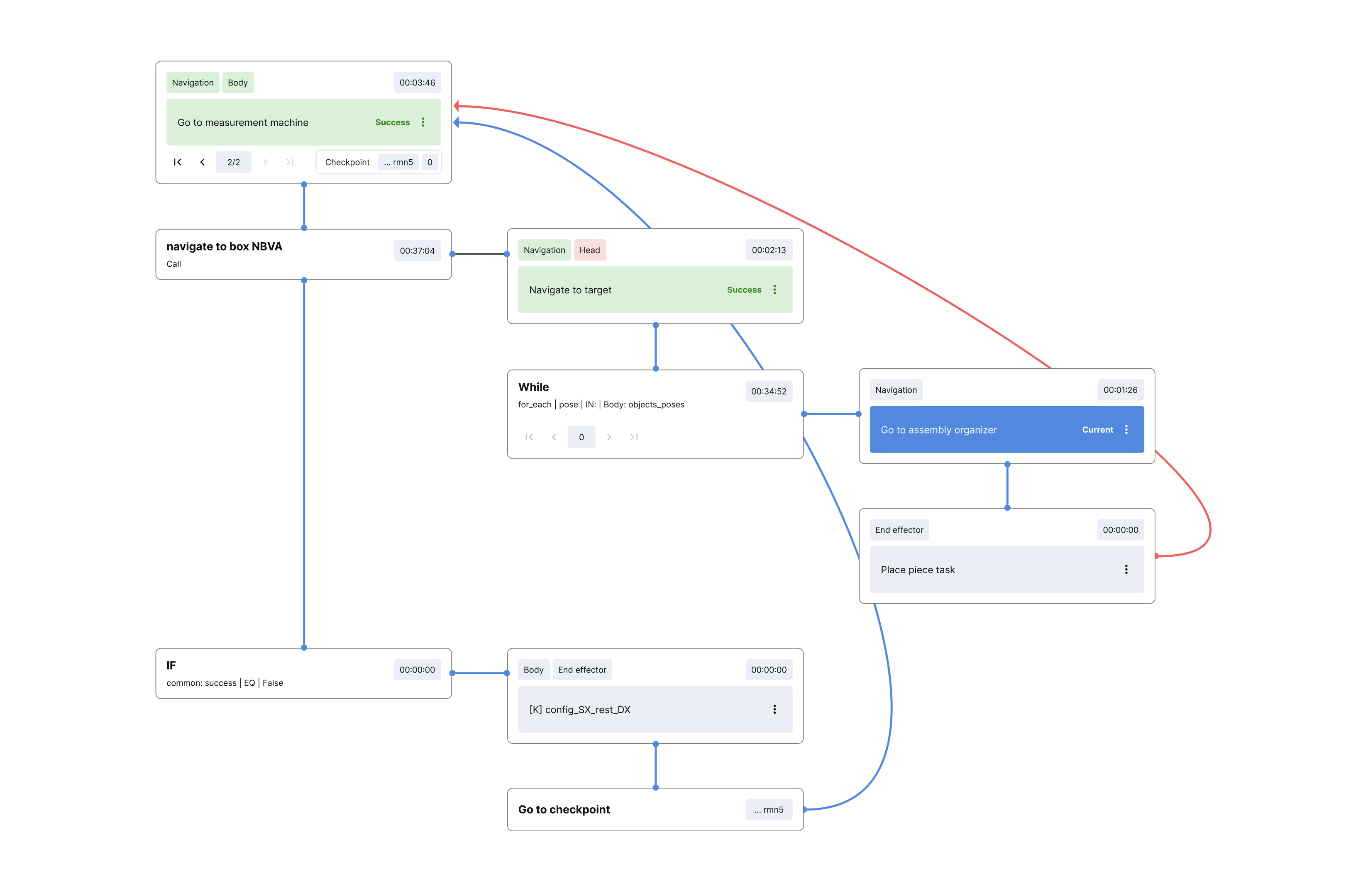
| ➔ | Full control flow logic including conditionals, loops, and escalation paths |
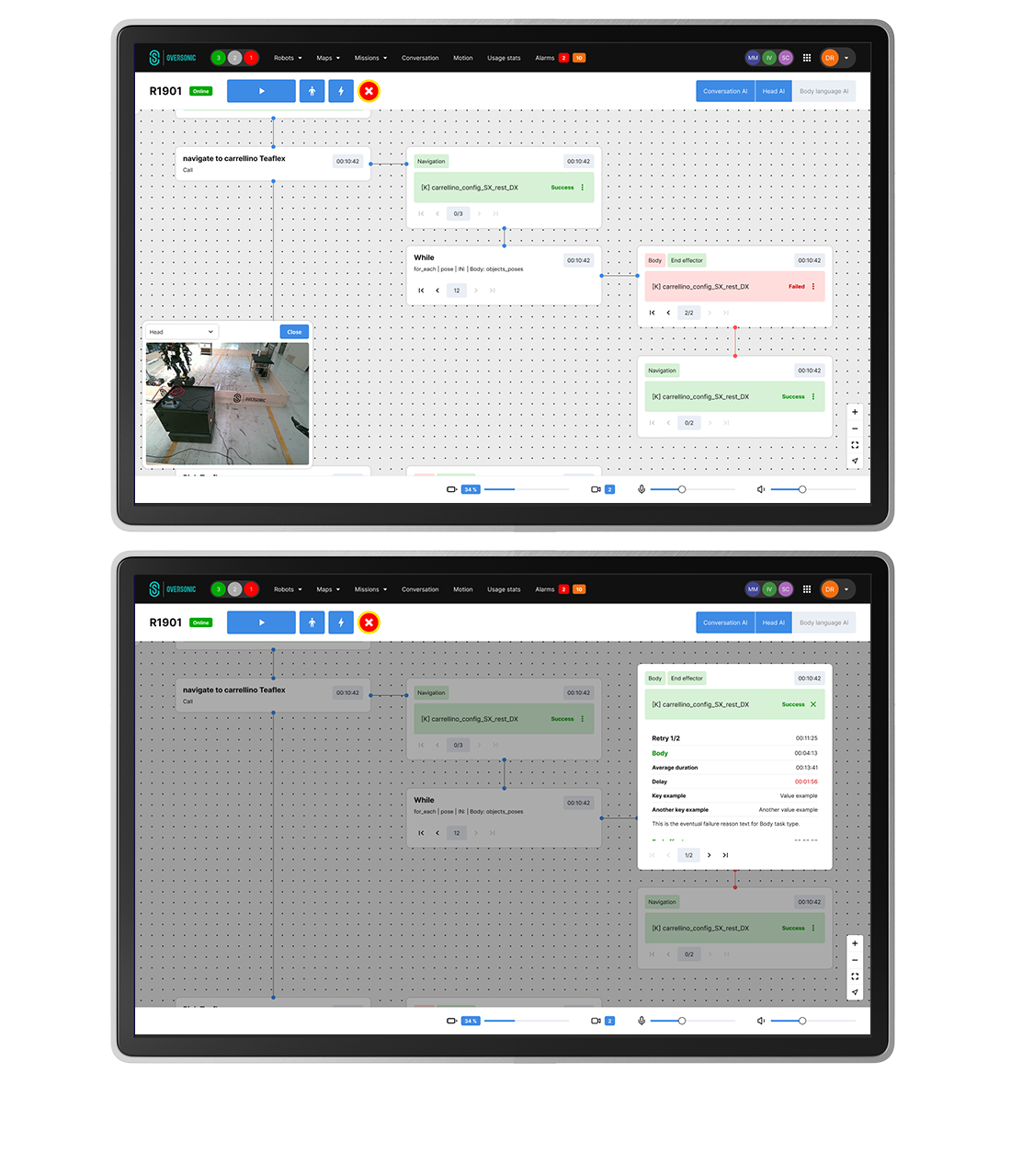
| ➔ | Real-time tracking of mission progress and system performance |
| ➔ | Deep inspection and replay tools for iterative optimization |
| Graph-based visual programming workspace |
| Drag-and-drop block construction |
| Multi-service concurrent task execution |
| Task detailed inspection |
| Nested control flow structures (if/else, while, loops) |
| Configurable success/failure policy management |
| Real-time execution state monitoring |
| Mission workflow import/export |