


The Motion Module provides comprehensive kinematic control and pose management for robotic platforms, orchestrating complex multi-joint movements with precision and repeatability. The system manages object and robot positioning in 3D space while coordinating articulated movements across body segments including legs, torso, head, and end effectors.
Built-in force sensing capabilities ensure safe interaction with the environment, while deterministic motion recording enables consistent reproduction of complex movement sequences.
The module supports both manual positioning and AI-driven autonomous movement tracking for dynamic object following and operational awareness.
| ➔ | Multi-joint real-time control Simultaneous coordination of up to 32 articulated joints with synchronized movement planning and execution across the entire robotic platform, including precise control of leg squat mechanisms for vertical positioning and torso slider systems for base-relative horizontal movement. |
|---|---|
| ➔ | Spatial management Comprehensive 3D pose configuration and memorization system for objects and robot positions in space, with dual coordinate system support enabling end effector control in both robot-relative and world-relative Cartesian coordinates for versatile manipulation tasks. |
| ➔ | Motion creator Deterministic movement sequence recording and playback functionality that captures complex multi-step motions with guaranteed path consistency, timing accuracy, and repeatability, ensuring the robot follows identical trajectories on every execution. |
| ➔ | Weightless mode teaching Advanced manual programming capability that temporarily disables joint resistance, allowing operators to physically guide the robot through desired motion sequences while the system records position data, enabling intuitive teach-by-demonstration workflows without requiring programming expertise. |
| ➔ | AI-integrated head control Autonomous head movement system with real-time tracking capabilities for objects, people, and operational tasks, seamlessly integrated with computer vision modules to provide dynamic visual engagement and situational awareness. |
| ➔ | Safety and force integration Built-in force sensing technology throughout the kinematic chain for impact detection and collision avoidance, with configurable safety thresholds, automatic motion interruption, and weightless mode enabling safe manual movement recording and teaching. |
The Motion Module transforms robotic platforms into precise, adaptable systems capable of complex coordinated movements while maintaining safety and operational consistency through advanced sensing and control algorithms.
Contact us for more details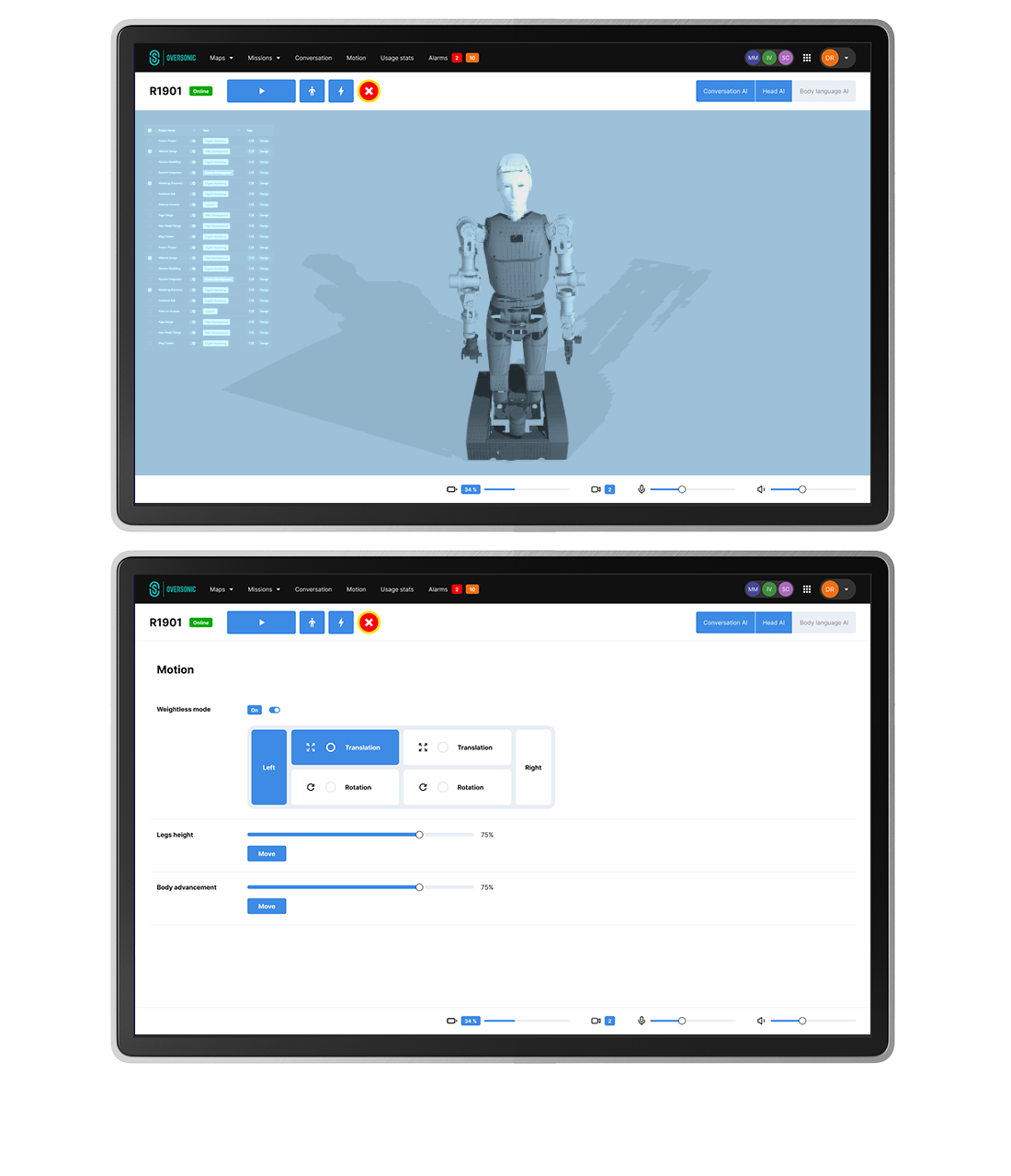
| Up to 32-joint real-time control |
| Dual Cartesian coordinate systems |
| Deterministic motion recording |
| Force sensor integration |
| Weightless mode |
| AI-based tracking integration |
| Multi-segment body coordination |