


The Navigation Module provides comprehensive autonomous movement capabilities through advanced SLAM algorithms and multi-sensor fusion, enabling robots to operate safely and efficiently in complex industrial environments.
The system combines LiDAR scanning, depth camera processing, and natural feature recognition to create detailed 3D digital twins of operational spaces while maintaining real-time localization and obstacle avoidance. Supporting both autonomous (AMR) and guided (AGV) navigation modes, the module adapts to diverse operational requirements from free-roaming warehouse operations to precision-guided manufacturing workflows.
The Navigation Module delivers enterprise-grade spatial intelligence through integrated mapping and navigation capabilities:
| ➔ | 3D environment mapping Initial facility scanning creates comprehensive digital twins with natural feature recognition. |
|---|---|
| ➔ | Dual navigation modes AMR autonomous pathfinding and AGV guided navigation with precise path following. |
| ➔ | Multi-sensor fusion Integrated LiDAR, depth cameras, and fiducial markers for robust localization. |
| ➔ | Obstacle management Real-time re-routing in crowded spaces with predictive collision avoidance. |
| ➔ | Precision positioning Tag-based navigation for workstations and magnetic line guidance for exact positioning. |
| ➔ | Zone management Configurable restricted areas, charging stations, and safety zones with access control. |
| ➔ | Real-time visualization Live trajectory display with planned routes and executed paths. |
| SLAM based 3D environment mapping |
| Interactive map editing and waypoint creation |
| Zoomable and draggable maps |
| Live path visualization and tracking |
| Real-time costmap generation and updates |
| Restricted zone management |
Environment mapping and localization
The system creates detailed 3D digital twins through systematic facility scanning using natural environmental features rather than artificial landmarks. SLAM algorithms continuously fuse multi-sensor data to maintain precise robot positioning while updating environmental understanding in real-time. Fiducial markers provide absolute position references for drift correction and reliable initialization, while particle filter algorithms ensure robust localization even in challenging scenarios.
| No infrastructure requirements |
| Loop closure for map consistency |
| Continuous map refinement |
Navigation Modes
AMR autonomous mode provides free-roaming navigation with intelligent pathfinding that adapts to environmental changes and obstacles, calculating optimal routes while maintaining continuous monitoring for dynamic re-routing. AGV guided mode enforces precise path following with minimal deviation, stopping when obstacles block required paths rather than calculating alternatives. Both modes seamlessly integrate with magnetic line guidance for centimeter-level positioning accuracy at critical workstations.
| AMR: predictive movement anticipation in crowded areas |
| AGV: stop-and-wait behavior for blocked paths |
| Magnetic guidance: accuracy for assembly line integration |
| Tag-based navigation: exact workstation docking capabilities |
Safety and obstacle management
The navigation system maintains real-time costmaps integrating static map data with dynamic obstacle detection from all sensor sources. Multi-layer safety evaluation distinguishes between people requiring wide margins, moving equipment needing predictive avoidance, and static obstacles allowing close approach. Emergency collision avoidance provides immediate reactive steering and braking, while strategic re-routing handles persistent blockages through alternative path selection.
| Costmap updates from 2D/3D LiDAR and depth cameras |
| Configurable safety margins based on obstacle type |
| Emergency reactive steering and braking |
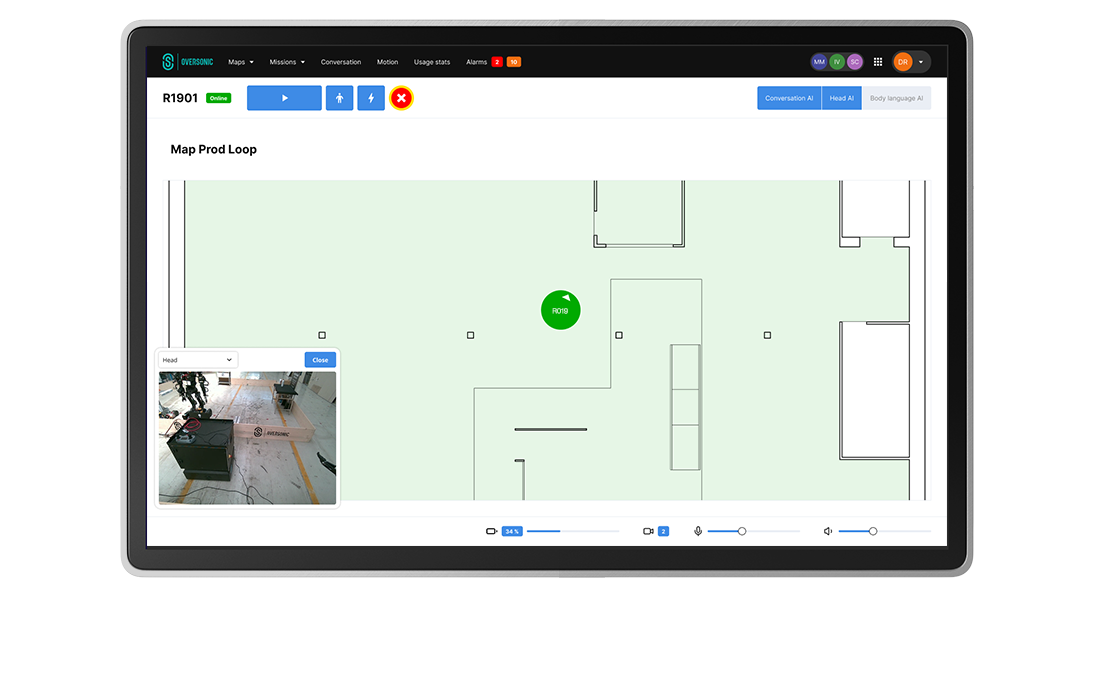
User interface
The navigation interface provides interactive map visualization with comprehensive operational oversight capabilities. Users can define saved positions, create waypoint sequences, and configure restricted zones through intuitive graphical tools. Real-time monitoring displays current robot position, destination tracking, and route progress with detailed telemetry, while historical path analysis provides performance metrics and optimization insights.
Contact us for more details| Drag-and-drop waypoint creation and route modification |
| Live telemetry with navigation sensor status |
| Historical path analysis with performance metrics |